
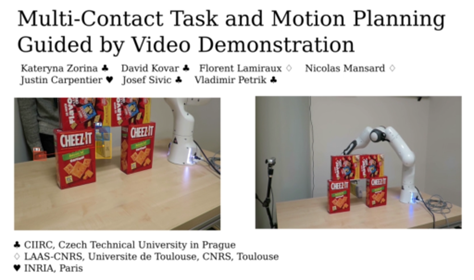
Our paper entitled multi-contact task and motion planning guided by video demonstration has been accepted for presentation at ICRA 2023.
This work aims at leveraging instructional video to guide the solving of complex multi-contact task-and-motion planning tasks in robotics. Our key novelty lies in combining contact states and 3D object poses extracted from the guiding video with a traditional planning algorithm that allows us to solve tasks with sequential dependencies, for example, if an object needs to be placed at a specific location to be grasped later.
This work is the result of the collaboration of all academic partners in the AGIMUS project.
Watch the video here.























